
前言
空洞卷积,Dilated Convolution,也可译为膨胀卷积或扩张卷积,可以使网络在不增加参数数量的情况下拥有更大的感受域。
提出
空洞卷积最初的提出是为了解决图像分割的问题,常见的图像分割算法通常使用池化层和卷积层来增加感受域,同时也缩小了特征图尺寸(resolution),然后再利用上采样还原图像尺寸,特征图缩小再放大的过程造成了精度上的损失,因此需要一种操作可以在增加感受域的同时保持特征图的尺寸不变,从而代替下采样和上采样操作,在这种需求下,空洞卷积就诞生了。当然,跳跃连接(skip connection)也是另一种弥补信息损失的方法。
空洞卷积自2016在ICLR上被提出后,本身是用在图像分割领域,但立马被Deepmind拿来应用到语音(WaveNet)和NLP领域,它在物体检测也发挥了重要的作用。
原理
在常规卷积运算中,固定大小的滤波器在输入特征图上滑动,滤波器中的值与输入特征图中的相应值相乘以产生单个输出值。输出特征图中神经元的感受域被定义为滤波器可以“看到”的输入特征图中的区域。感受域的大小由滤波器的大小和卷积的步长决定。
相反,在膨胀卷积运算中,通过在滤波器值之间插入间隙来“扩张”滤波器。膨胀率(dilation rate) 决定了间隙的大小,它是一个可以调整的超参数。当膨胀率为 1 时,膨胀卷积简化为常规卷积。
膨胀率在不增加参数数量的情况下有效地增加了滤波器的感受域,因为滤波器的大小仍然相同,但值之间有间隙。这在需要更大感受域的情况下很有用,但增加滤波器的大小会导致参数数量和计算复杂性的增加。
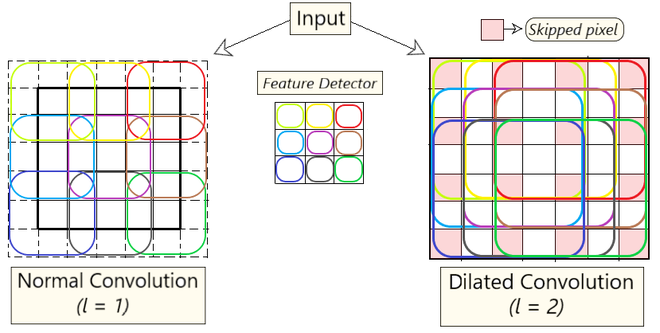
下图描述了正常卷积与扩张卷积之间的差异,附加参数$l$(膨胀因子)表示输入扩张了多少。换句话说,根据该参数的值,滤波器中会跳过$(l-1)$个像素。
膨胀卷积的公式可表示如下:
其中,$F(s)$为输入特征,$s$为各采样位置,$k(t)$表示卷积核$k$在$t$处的权重,${*l}$表示膨胀因子为$l$的膨胀卷积。
$(F_{* l} k)(p)$为在位置$p$处的输出。求和条件还需要再看下…
代码
在Pytorch中实现空洞卷积十分简单,只需要指定dilation参数即可。
1 | class DilatedCNN(nn.Module): |
可能产生的问题
- 网格效应(The Gridding Effect)
- Long-ranged information might be not relevant.
参考文献
[1] https://zhuanlan.zhihu.com/p/113285797
[2] https://www.geeksforgeeks.org/dilated-convolution/
[3] https://developer.orbbec.com.cn/v/blog_detail/892
后记
首发于 silencezheng.top,转载请注明出处。

